Machine automatique d'assemblage 2D
Conception, fabrication et programmation d'une machine d'assemblage.

Contexte du projet
DiyPixelArt propose deux gammes : des kits à assembler soi-même et des produits déjà assemblés. Cette seconde gamme s’adresse aux clients intéressés par le résultat final sans l’aspect loisir créatif.
La partie la plus chronophage de la réalisation est la dépose des cylindres sur la grille selon le motif. Cette machine est la troisième et la plus complexe des machines conçues pour DiyPixelArt. Elle automatise cette étape en elle réalisant la dépose cylindre par cylindre selon n’importe quel motif.
Problématique et contraintes
Contraintes :
- La machine doit être capable d’assemblage toutes variations d’images
- Limiter le nombre d’intervention opérateur
- Projet auto-financé : pas de sous-traitance ni d’usinage de précision
- Précision de positionnement pour déposer au bon endroit
Réalisation
Etude de l’existant
De par l’application, il existe peu de matériel industriel pour une telle machine. La seule machine industrielle trouvée est un démonstrateur de la marque Nabbi/Photopearl : youtube.com. Il s’agit d’une machine autonome de démonstration avec un scara industriel qui réalise du pick and place sur une surface d’environ 15x15cm.
Du côté de la communauté, de nombreuses personnes ont eu des idées de machine. De fonctionnel, je ne connais qu’un exemple qui est celui de l’ingénieur Kevin Dluzen qui a réalisés deux versions : V1 sur youtube.com et V2 sur youtube.com
Les concepts utilisés ont servi de base à la conception de cette nouvelle machine.
Conception
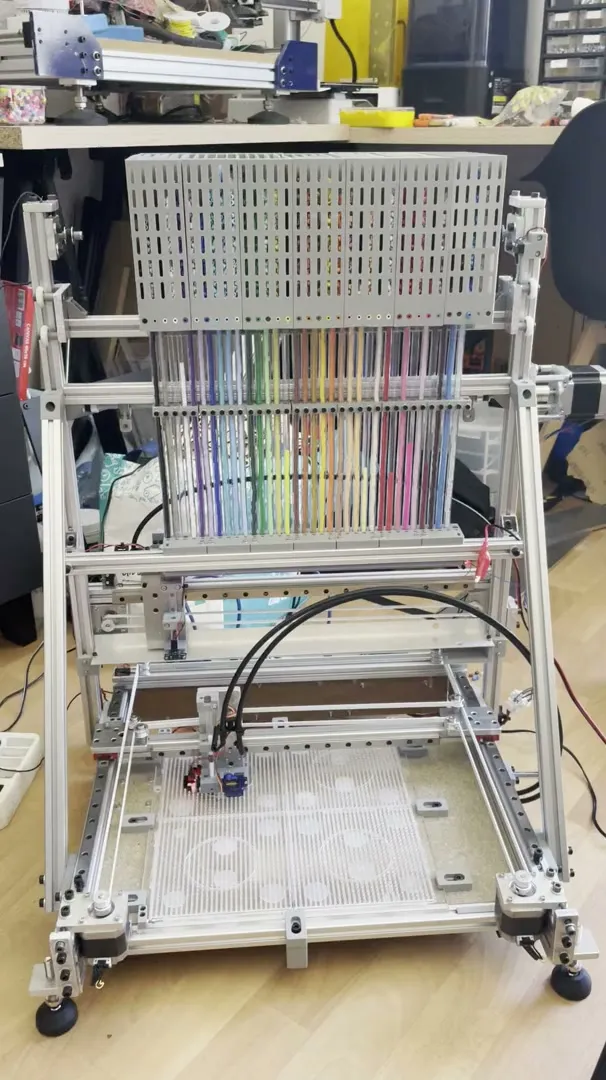
La machine a été modélisée sur SolidWorks. Elle est composées de 3 sous-ensembles principaux :
Magasin vrac : 35 casiers accueillent les cylindres séparés par couleur. Les cylindres sont achetés en vrac par couleur ou sont issues du tri réalisé par la machine de tri. Chaque casier alimente un tuyau transparent dans lequel les perles s’alignent en file indienne, toujours dans la même orientation.
Plateforme de préparation : en temps masqué, pendant que la dépose est en cours sur le plateau, cette plateforme prépare la séquence suivante en sélectionnant les perles par cisaillement en bas des tuyaux selon le motif.
Plateforme de dépose : elle se positionne au-dessus de chaque position sur la grille et dépose le cylindre à cette position.
Architecture de contrôle
La complexité d’intégration de cette machine est significative :
- 4 + 2 axes électriques : 2 axes + 1 séparateur plateforme de dépose, 1 axe + 1 séparateur plateforme préparation, 1 axe magasin vrac
- 4 capteurs de fin de course : homing des 4 axes électriques pilotés par moteur pas-à-pas
- 3 capteurs de présence : détection de l’absence de cylindre dans les positions de transfert
- 2 cartes Arduino : Contrôle de la plateforme de dépose et de la plateforme de préparation + chargement vrac de manière indépendante en esclave
- 1 Raspberry Pi : Compilation d’une image en en gcode machine, surveillance des capteurs de présence et maître du pilotage de la machine
L’image du motif peut être réalisée grace au projet de l’application web Une fois l’image chargée sur la machine, le Raspberry Pi traduit à la volée le motif en séquence d’instructions machines Gcode et envoies les commandes aux 2 CNC.
Réglage
De nombreux mouvements sont présents sur la machine ayant nécessité un alignement précis et ajustement des pièces pour que tout fonctionne bien. Cependant il y a un endroit de la machine qui n’a pu être correctement aligné pour garantir le fonctionnement : le plateau de dépose. En effet ce plateau réutilise les plaques standard du commerce qui n’existent qu’en petites taille, le plateau est donc composée de quatre plaques individuelles assemblées. En l’absence de précision d’usinage, les plaques ne sont jamais parfaitement alignées entre elles. De plus, le nombre de positions individuelles est élevés (58 rangées x 58 colonnes = plus de 3000 positions.) De plus ne disposant pas de la précision des outils de fabrication, je n’ai aucune référence précise pour aligner la plateforme de dépose et le plateau.
Ne pouvant résoudre le problème purement mécanique, j’ai adopté une stratégie de calibration en automatisme. Pour cela j’ai conçu un petit posage pour embarquer une petite caméra sur la plateforme de dépose qui peut voir les picots du plateau de dépose. En fixant un repère (logiciel) sur la caméra, j’ai avoir une référence répétable entre la plateforme de dépose et le plateau pour chaque position.
Cependant apprendre les 3000 positions n’était toujours pas envisageable. J’ai donc divisé chaque plaque de 29x29 en 4 cadrants avec 9 points pour réaliser une interpolation bilinéaire. Résultat : compensation réelle de la position pour positionner exactement au bon endroit.
Résultats
Première dépose

Dépose sur l'ensemble du plateau en accéléré pendant mise au point
Pites d’amélioration
- Magasins vrac : pour accueillir les 35 couleurs sur l’axe, les casiers sont font avec une largeur de 10 mm, ce qui provoque des blocages des cylindres à l’intérieur qui ne tombent plus par gravité. Une piste envisageable serait de regrouper les casiers par 3 (Un devant / Un au centre / Un derrière) pour augmenter la largeur et réduisant la longueur et en profiant de la flexibilité des tuyaux.
- Cadence : le facteur limitant actuel est la vitesse d’alignement des perles dans les tuyaux qui limite la cadence de dépose.
- Inertie : Embarquer tous les casiers vracs sur un axe vertical représente une inertie importante, limitant la dynamique de l’axe. Une piste envisageable serait d’avoir les casiers fixes et à la place d’avoir une bague autour des tuyaux avec un mouvement vertical qui réaliserait le mouvement d’agitation des cylindres.
- Fixation caméra de réglage : la caméra de calibration n’a pas été prévue à l’étude initiale et nécessite du démontage et remontage. Pour conserver la répétabilité, il pourrait être intéressant de la conserver montée sur la plateforme.
Bilan du projet et apprentissages
Avec 6 axes, 4 fins de course, 3 capteurs de présence, 2 Arduinos et un Raspberry Pi, cette machine est le projet personnel le plus complexe réalisé à ce jour. Elle illustre la démarche complète d’une machine spéciale : conception, fabrication, assemblage, câblage, réglage et programmation, menés avec des moyens contraints. La démarche est très proche de celle pratiquée en bureau d’études chez OSE, mais menée de A à Z par une seule personne et sur budget personnel.