Machine automatique de tri par couleur
Conception, fabrication et programmation d'une machine de tri.
Contexte du projet
Cette machine est la deuxième des quatre machines conçues pour DiyPixelArt. Son objectif est de trier automatiquement les perles mélangées pour les séparer par couleur.
Problématique et contraintes
- Reconnaissance de 35 couleurs distinctes
- Perles mélangées en vrac en entrée, séparées par couleur en sortie
- Positionnement précis de chaque perle devant le capteur de couleur
- Fonctionnement en automatique pour limité l’intervention humaine
Réalisations
Conception
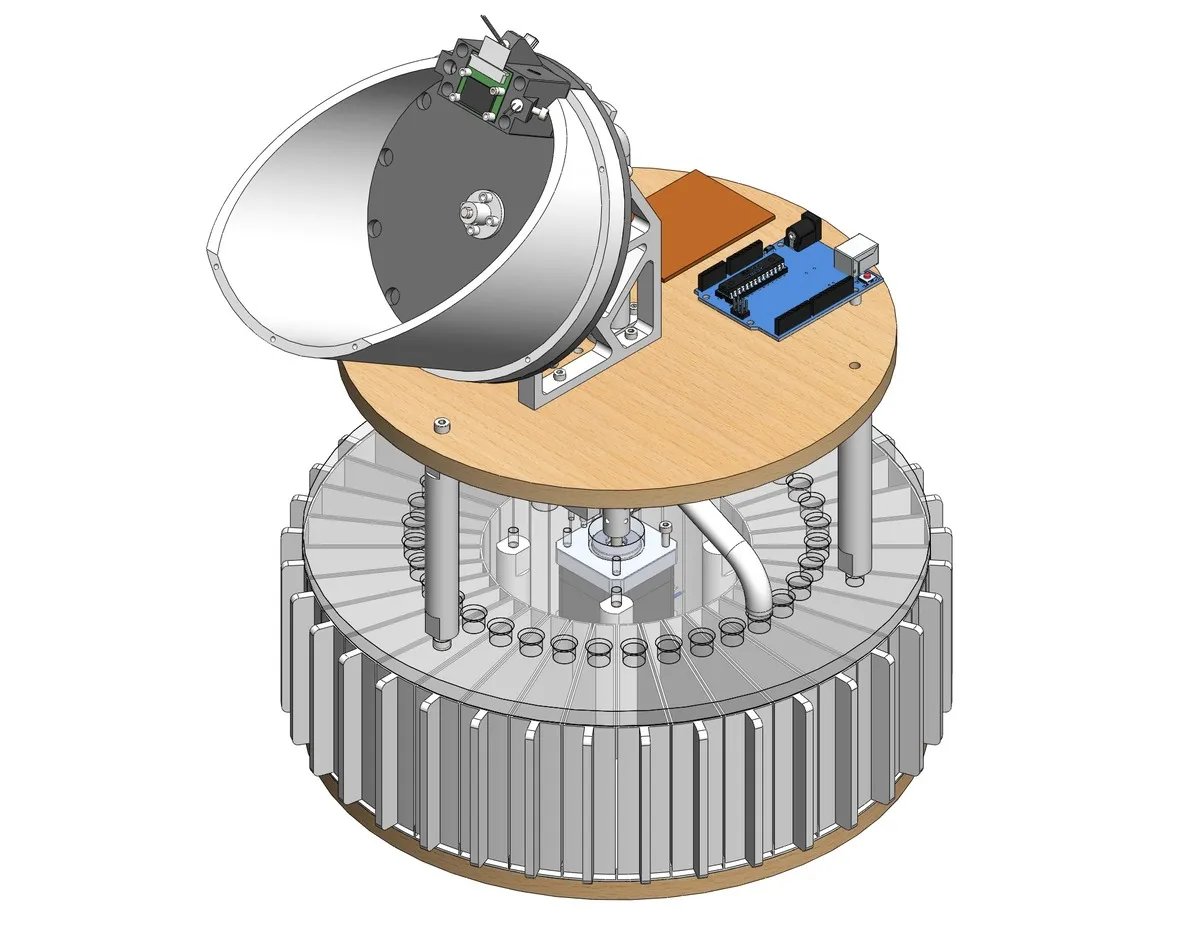
Le bol de distribution développé pour la machine de comptage est directement réutilisé : la perle est isolée par le disque rotatif et doit être positionnée précisément devant le capteur avant d’être évacuée vers le bon casier.
Le disque tournant en continu dans le même sens, un capteur à effet Hall associé à un aimant a été choisi pour détecter la position angulaire sans contact. Une séquence de homing au démarrage initialise la position de référence.
Pour les casiers de réception, un concept rotatif a été retenu : les 35 casiers sont répartis sur la circonférence d’un plateau tournant, accessibles dans toutes les directions. La mécanique d’entraînement est placée à l’intérieur du plateau pour libérer l’accès aux casiers sur tout le pourtour. Chaque casier est équipé d’une poignée pour faciliter l’extraction.
La pièce de plateau est imprimée en 3D, entraînée directement par un moteur en partie basse et guidée par un roulement en partie haute.
Vision par caméra
Un Raspberry Pi associé à une caméra assure le traitement d’image.
La mise en œuvre d’un système de vision fiable soulève plusieurs problématiques :
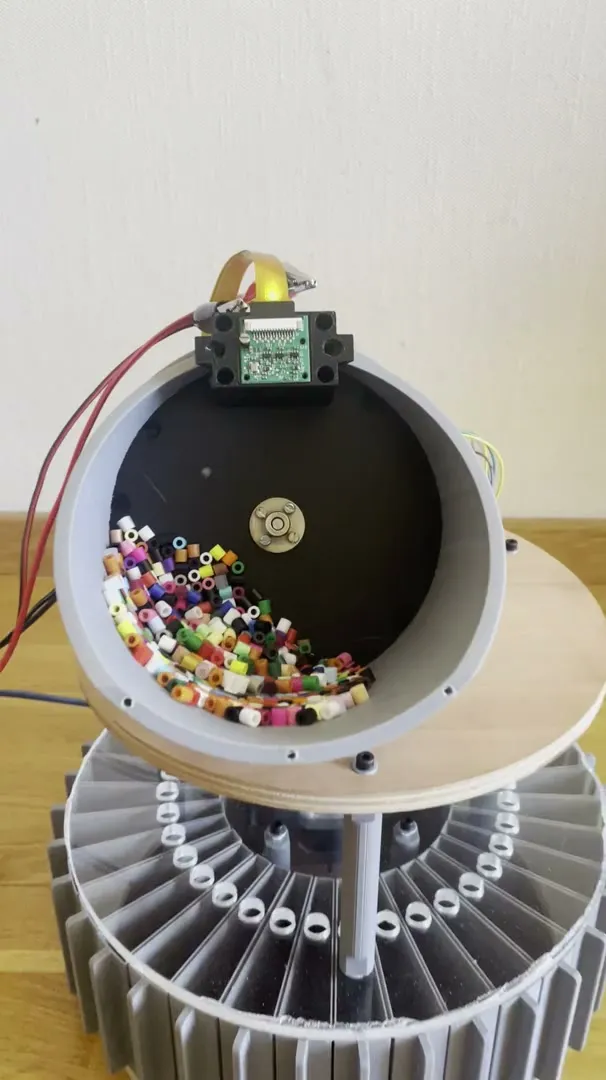
- Environnement lumineux : le caisson est peint en RAL 9005 mat pour éliminer les perturbations lumineuses extérieures — même principe que les cellules de vision industrielles.
- Éclairage : l’uniformité de la lumière sur la perle est critique. Distance, intensité et diffusion ont été ajustées par essais successifs.
- Reflets : les perles étant brillantes, l’algorithme filtre les zones surexposées avant traitement.
Le traitement s’effectue sur une région d’intérêt (ROI) centrée sur la perle. La couleur moyenne de la ROI est calculée, convertie dans l’espace colorimétrique LAB, puis comparée aux couleurs de référence par distance euclidienne. La couleur la plus proche est retenue. Un apprentissage préalable a permis d’enregistrer la couleur de référence de chaque teinte dans les conditions d’éclairage de la machine.
Résultats
Machine de tri
La machine est fonctionnelle avec un taux de reconnaissance d’environ 90%. Les erreurs concernent principalement des teintes proches (violet foncé / bleu foncé) que le capteur ne parvient pas à discriminer de manière fiable dans les conditions actuelles. Cependant le travail réalisé de regroupement de teintes similaires est déjà un gain de temps significatif.
Pistes d’amélioration
- Améliorer l’uniformité de l’éclairage
- Trouver un capteur de couleur avec une plage de réponse spectrale plus large pour mieux discriminer les teintes proches
Bilan du projet et apprentissages
Ce projet a été la l’occasion de se confronter aux problématiques rencontrées par les automaticiens en vision.
Trois enseignements principaux :
- L’environnement lumineux est un facteur critique.
- Le réglage fin (position caméra, distance focale, diffusion lumière) doit être anticipé en conception par des degrés de liberté dédiés.
- La qualification du matériel par essai est indispensable (notamment pour implémentation sur machine de production).
Les perles triées par cette machine alimentent directement la machine de comptage ainsi que la machine d’assemblage.