Mini bras robotisé
Conception, fabrication et programmation d'un mini bras robotisé.
Contexte du projet
Avril 2020 est marqué par le premier confinement du covid. Les apprentis de l’entreprise sont en chômage partiel, je profite de ce temps pour travailler sur un projet personnel en parallèle de mes cours d’école d’ingénieur.
L’objectif : concevoir, fabriquer et programmer une version miniature d’un bras robotisé 3 axes, de A à Z.
Problématique et contraintes
Les kits commerciaux de mini bras robot existent, mais tout y est déjà fait — pièces conçues, électronique inclus et déjà programmé. Cela n’offre aucun apprentissage réel.
Le parti pris est de repartir de zéro : concevoir toutes les pièces sous SolidWorks, les imprimer, câbler l’électronique et écrire le code.
Réalisation
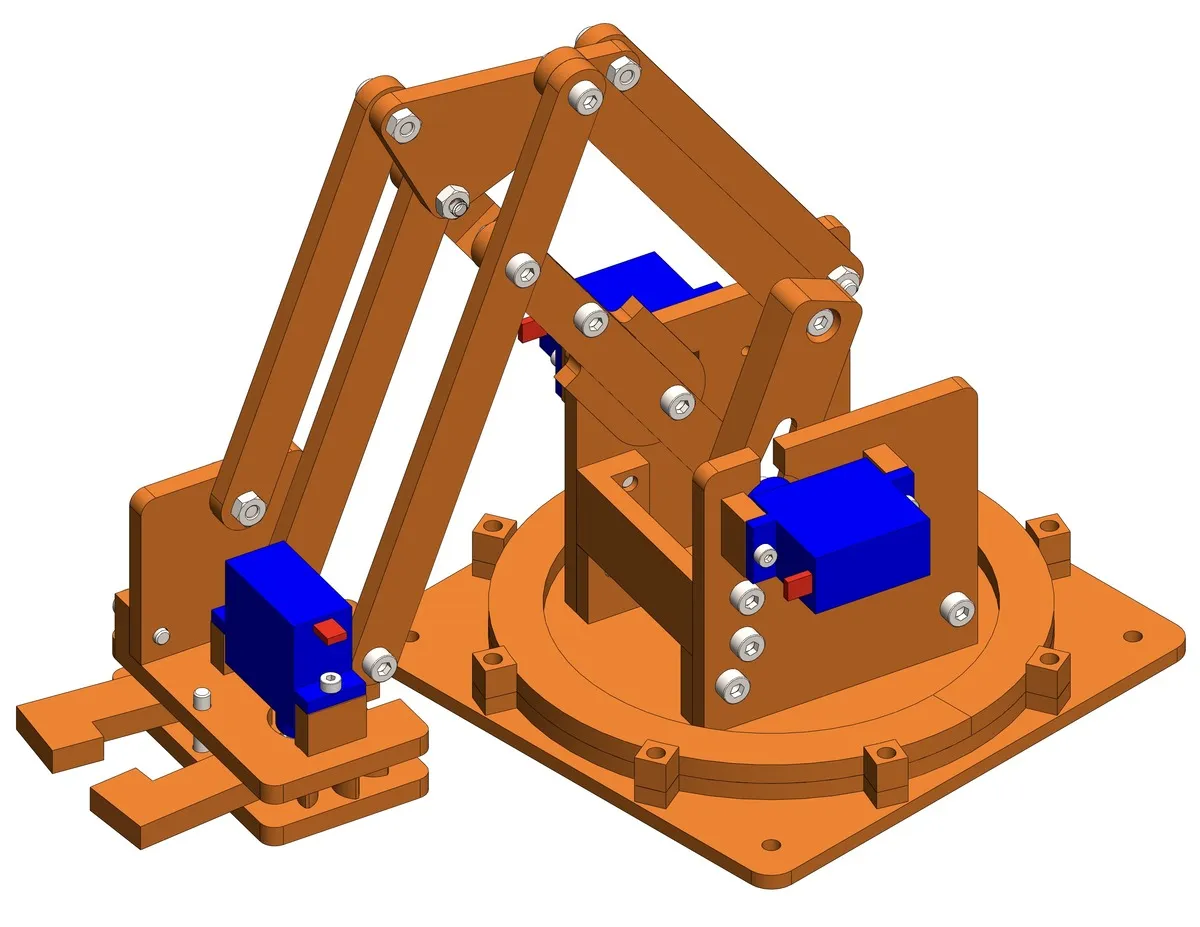
Conception
C’est l’un de mes tout premiers projets sous SolidWorks. La conception n’est pas remarquable, mais les apprentissages sont concrets :
- Comprendre l’impact des dimensions des pièces individuelles sur l’assemblage global, visible en temps réel en CAO
- Juger de quand l’approche géométrique par CAO ou approche analytique calculée est la plus adaptée
- Gestion des contraintes et des degrés de liberté dans un assemblage
En dehors des servomoteurs et des vis de fixation, toutes les pièces sont imprimées en 3D.
Fabrication et assemblage
Qui dit mauvaise conception dit problèmes au montage. Ainsi je suis confronté aux problématiques classiques : composant réel différent du modèle 3D, accessibilité limitée dans certaines zones, jeux insuffisants au montage. L’avantage de l’impression 3D : les itérations sont rapides ! Après quelques reprises, l’ensemble prend forme et le robot peut être déplacé manuellement à la main.
Cinématique
Le robot est piloté par une télécommande à deux joysticks qui font varier directement les angles des servomoteurs. Le sens direct (angles moteurs → position) est relativement simple par trigonométrie. Cependant la problématique inverse, c’est-à-dire à partir d’une position cartésienne cible de calculer les angles de chaque articulation est bien plus complexe. Je ressors les équations vues en cours, les applique à mon cas d’études et les implémente dans le code : le robot peut aller tout seul à une position cartésienne définie en calculant les angles nécessaires. Aujourd’hui avec les outils IA existant, cela serait probablement d’une facilité déconcertante. Mais réussir cela à l’époque était tout de même un accomplissement.
Résultat
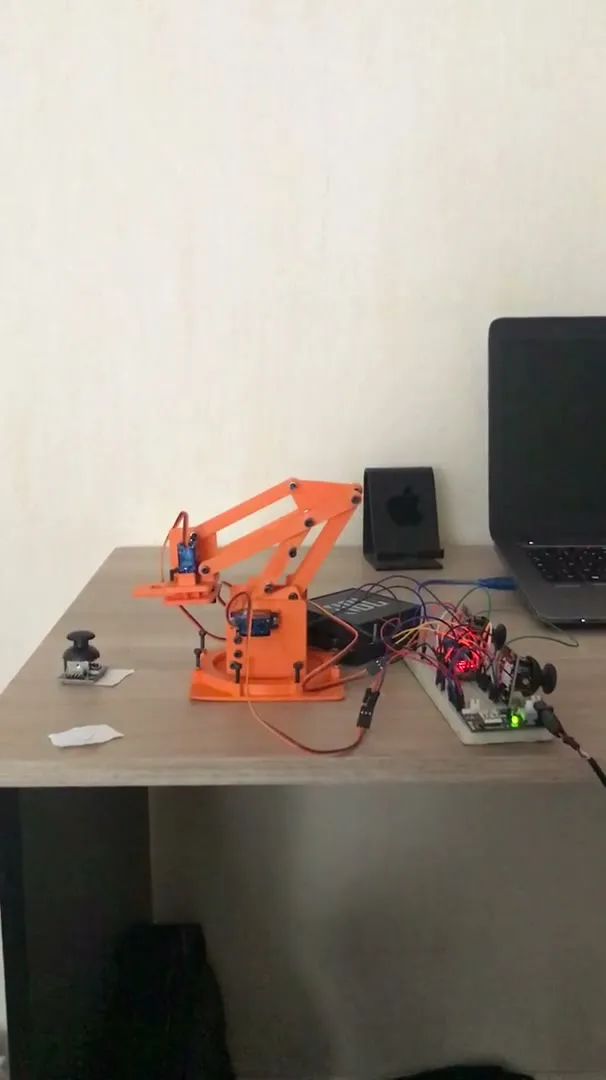
Déplacement d'un objet en automatique par le bras robot après apprentissage des points
Bilan du projet et apprentissages
Le bras fonctionne comme prévu. Bien sûr, ici on ne parlera pas de critères de répétabilité, de payload ou de rigidité, ce n’était pas l’objectif. Finalement ce projet m’a permis de :
- Pratiquer sur solidWorks et sortir un assemblage fonctionnel en réel
- Implémenter les équations de cinématique inverse sur un cas concret
- Comprendre les dépendances et contraintes des différents métiers (conception, fabrication, assemblage, programmation)